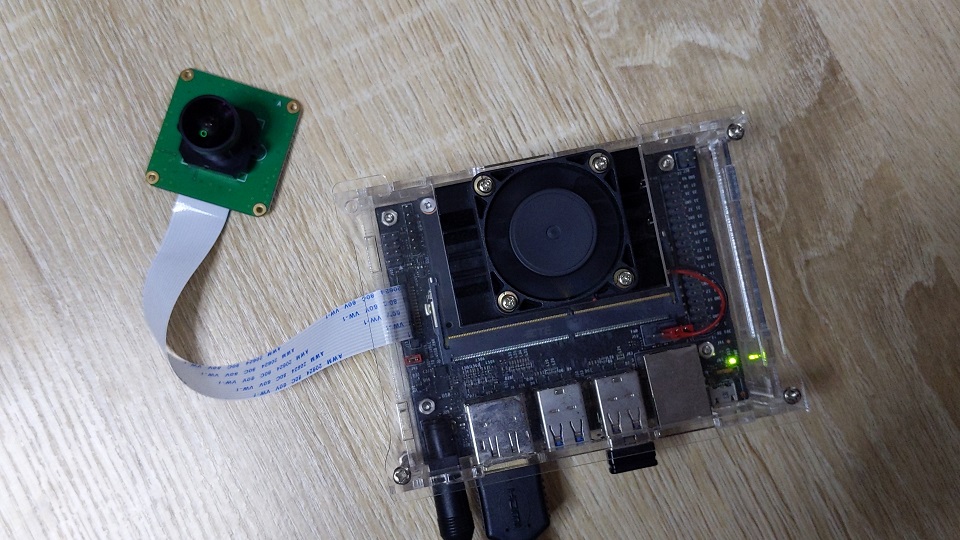
普段, Jetson Nanoでカメラを使う際にはUSBタイプを使うのだが, 今回初めてMIPI CSI-2タイプのカメラを試してみた.
今回使ったカメラはこれ.
・Jetson Nano Camera IMX219PQ 8M Color CMOS Sensor IR-Filter Wide Angle Fished eye Len FOV158 degree
OpenCVでこれを使おうとすると, USBタイプのようにはいかなかったので, メモとしてまとめておく.
[Jetson Nano]
関連記事:
- Jetson NanoにCSI-2カメラを繋いでみたー(1)
- Jetson NanoにCSI-2カメラを繋いでみたー(2)
0. まずはどうなる?
カメラ画像をキャプチャするのに使用するOpenCVのVideoCapture()をUSBカメラの時と同じように使用するとどうなるか?
[ソース; camera_test.py]
import sys import cv2 cap = cv2.VideoCapture(0) if not cap.isOpened(): print('Can not open camera.') sys.exit() while True: ret, frame = cap.read() if not ret: break frame = cv2.resize(frame, (640, 360)) cv2.imshow('Viewer', frame) if cv2.waitKey(30) == 27: break cv2.destroyAllWindows() cap.release()
[実行結果]
$ python3 camera_test.py [ WARN:0] global /home/nvidia/host/build_opencv/nv_opencv/modules/videoio/src/cap_gstreamer.cpp (1757) handleMessage OpenCV | GStreamer warning: Embedded video playback halted; module v4l2src0 reported: Internal data stream error. [ WARN:0] global /home/nvidia/host/build_opencv/nv_opencv/modules/videoio/src/cap_gstreamer.cpp (886) open OpenCV | GStreamer warning: unable to start pipeline [ WARN:0] global /home/nvidia/host/build_opencv/nv_opencv/modules/videoio/src/cap_gstreamer.cpp (480) isPipelinePlaying OpenCV | GStreamer warning: GStreamer: pipeline have not been created Gtk-Message: 17:48:31.473: Failed to load module "canberra-gtk-module"

デバイスのオープンエラーとはならないが, 正しく表示されない.
"ls /dev/video*"でカメラデバイスを確認したとき, usbカメラと同じように"/dev/video0"が確認できたので, usbカメラと同様に扱えると思ったのだが, どうも違うようだ.
1. カメラ情報の確認
v4l-utilsを使って, カメラ情報を確認してみる.
$ sudo apt install v4l-utils
$ v4l2-ctl --list-devices
vi-output, imx219 6-0010 (platform:54080000.vi:0):
/dev/video0
$ v4l2-ctl -d /dev/video0 --all
Driver Info (not using libv4l2):
Driver name : tegra-video
Card type : vi-output, imx219 6-0010
Bus info : platform:54080000.vi:0
Driver version: 4.9.140
Capabilities : 0x84200001
Video Capture
Streaming
Extended Pix Format
Device Capabilities
Device Caps : 0x04200001
Video Capture
Streaming
Extended Pix Format
Priority: 2
Video input : 0 (Camera 0: no power)
Format Video Capture:
Width/Height : 3264/2464
Pixel Format : 'YUYV'
Field : None
Bytes per Line : 6528
Size Image : 16084992
Colorspace : sRGB
Transfer Function : Default (maps to sRGB)
YCbCr/HSV Encoding: Default (maps to ITU-R 601)
Quantization : Default (maps to Limited Range)
Flags :
Camera Controls
group_hold 0x009a2003 (bool) : default=0 value=0 flags=execute-on-write
sensor_mode 0x009a2008 (int64) : min=0 max=0 step=0 default=0 value=0 flags=slider
gain 0x009a2009 (int64) : min=0 max=0 step=0 default=0 value=16 flags=slider
exposure 0x009a200a (int64) : min=0 max=0 step=0 default=0 value=13 flags=slider
frame_rate 0x009a200b (int64) : min=0 max=0 step=0 default=0 value=2000000 flags=slider
bypass_mode 0x009a2064 (intmenu): min=0 max=1 default=0 value=0
override_enable 0x009a2065 (intmenu): min=0 max=1 default=0 value=0
height_align 0x009a2066 (int) : min=1 max=16 step=1 default=1 value=1
size_align 0x009a2067 (intmenu): min=0 max=2 default=0 value=0
write_isp_format 0x009a2068 (bool) : default=0 value=0
sensor_signal_properties 0x009a2069 (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
sensor_image_properties 0x009a206a (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
sensor_control_properties 0x009a206b (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
sensor_dv_timings 0x009a206c (u32) : min=0 max=0 step=0 default=0 flags=read-only, has-payload
low_latency_mode 0x009a206d (bool) : default=0 value=0
sensor_modes 0x009a2082 (int) : min=0 max=30 step=1 default=30 value=6 flags=read-only
$ v4l2-ctl -d /dev/video0 --list-formats-ext
ioctl: VIDIOC_ENUM_FMT
Index : 0
Type : Video Capture
Pixel Format: 'RG10'
Name : 10-bit Bayer RGRG/GBGB
Size: Discrete 3264x2464
Interval: Discrete 0.048s (21.000 fps)
Size: Discrete 3264x1848
Interval: Discrete 0.036s (28.000 fps)
Size: Discrete 1920x1080
Interval: Discrete 0.033s (30.000 fps)
Size: Discrete 1280x720
Interval: Discrete 0.017s (60.000 fps)
Size: Discrete 1280x720
Interval: Discrete 0.017s (60.000 fps)
2. GStreamerの利用[1]
MIPI CSI-2カメラについてネットを調べていると, JetsonHasksNanoでサンプルコードを発見!!
GStreamerのpipelineを利用するようだ.
これを参考に, OpenCVのVideoCaputer()で映像を表示することができた.
[コード]
import sys import cv2 # GStreamer pipeline def gstreamer_pipeline( capture_width=1280, capture_height=720, display_width=1280, display_height=720, framerate=60, flip_method=0, ): return ( "nvarguscamerasrc ! " "video/x-raw(memory:NVMM), " "width=(int)%d, height=(int)%d, " "format=(string)NV12, framerate=(fraction)%d/1 ! " "nvvidconv flip-method=%d ! " "video/x-raw, width=(int)%d, height=(int)%d, format=(string)BGRx ! " "videoconvert ! " "video/x-raw, format=(string)BGR ! appsink" % ( capture_width, capture_height, framerate, flip_method, display_width, display_height, ) ) cap = cv2.VideoCapture(gstreamer_pipeline(display_width=640, display_height=360), cv2.CAP_GSTREAMER) if not cap.isOpened(): print('Can not open camera.') sys.exit() while True: ret, frame = cap.read() if not ret: break cv2.imshow('Viewer', frame) if cv2.waitKey(30) == 27: break cv2.destroyAllWindows() cap.release()
[実行結果]
$ python3 camera_test.py GST_ARGUS: Creating output stream CONSUMER: Waiting until producer is connected... GST_ARGUS: Available Sensor modes : GST_ARGUS: 3264 x 2464 FR = 21.000000 fps Duration = 47619048 ; Analog Gain range min 1.000000, max 10.625000; Exposure Range min 13000, max 683709000; GST_ARGUS: 3264 x 1848 FR = 28.000001 fps Duration = 35714284 ; Analog Gain range min 1.000000, max 10.625000; Exposure Range min 13000, max 683709000; GST_ARGUS: 1920 x 1080 FR = 29.999999 fps Duration = 33333334 ; Analog Gain range min 1.000000, max 10.625000; Exposure Range min 13000, max 683709000; GST_ARGUS: 1640 x 1232 FR = 29.999999 fps Duration = 33333334 ; Analog Gain range min 1.000000, max 10.625000; Exposure Range min 13000, max 683709000; GST_ARGUS: 1280 x 720 FR = 59.999999 fps Duration = 16666667 ; Analog Gain range min 1.000000, max 10.625000; Exposure Range min 13000, max 683709000; GST_ARGUS: 1280 x 720 FR = 120.000005 fps Duration = 8333333 ; Analog Gain range min 1.000000, max 10.625000; Exposure Range min 13000, max 683709000; GST_ARGUS: Running with following settings: Camera index = 0 Camera mode = 5 Output Stream W = 1280 H = 720 seconds to Run = 0 Frame Rate = 120.000005 GST_ARGUS: PowerService: requested_clock_Hz=12096000 GST_ARGUS: Setup Complete, Starting captures for 0 seconds GST_ARGUS: Starting repeat capture requests. CONSUMER: Producer has connected; continuing. [ WARN:0] global /home/nvidia/host/build_opencv/nv_opencv/modules/videoio/src/cap_gstreamer.cpp (933) open OpenCV | GStreamer warning: Cannot query video position: status=0, value=-1, duration=-1 Gtk-Message: 00:12:37.718: Failed to load module "canberra-gtk-module"

Warningが出ているが, 一応カメラ画像をキャプチャし, 表示することができた.
ただ, 周囲が少し赤みがかるなど, 画質があまりよくない.
このカメラはシャッタースピードや絞りの設定などが行えるのか, 少し調べてみようと思う.
----
参照URL:
[1] JetsonHacksNano/CSI-Camera



(Lift Version)")